-
Class Summary Class Description SoFloodFillThresholdProcessing SoFloodFillThresholdProcessingengine TheSoFloodFillThresholdProcessingengine transforms a grayscale image into a binary image performing a region growing from a seed.SoMarkerBasedWatershedProcessing SoMarkerBasedWatershedProcessingengine performs a fast determination of the watershed lines. -
Enum Summary Enum Description SoMarkerBasedWatershedProcessing.OutputModes SoMarkerBasedWatershedProcessing.PrecisionModes
Package com.openinventor.imageviz.engines.imagesegmentation.regiongrowing Description
This group contains segmentation engines based on the propagation of a seed.
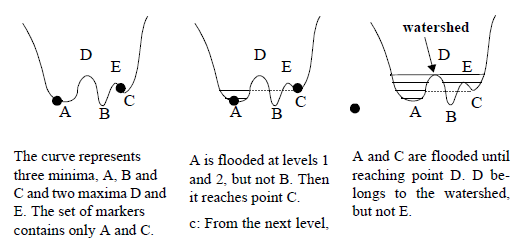
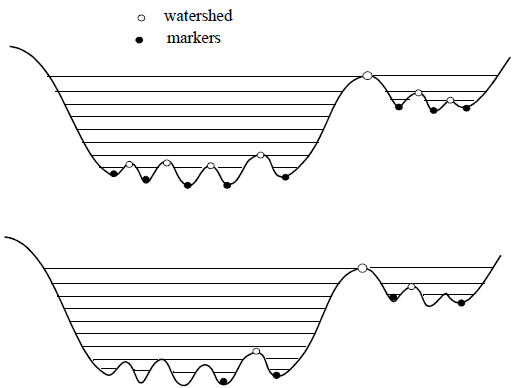
Watershed
The principle of the watershed algorithm is called immersion, and it is based on a simulation of the rise of water from a set of markers. The level p is flooded at a uniform speed from the fronts coming from level p-1 and the local minima appear at level p. A point of the watershed appears when two distinct fronts join.
 Our watershed implementation is based on:
Our watershed implementation is based on:
- L. Vincent and P. Soille. Watersheds in Digital Spaces: An Efficient Algorithm Based on Immersion Simulations. IEEE Transactions on Pattern Analysis and Machine Intelligence archive, Volume 13, Issue 6. June 1991.
- S. Beucher and F. Meyer. The morphological approach to segmentation: the watershed transformation. In E. Dougherty, editor, Mathematical morphology in image processing, chapter 12, pages 433–481. Marcel Dekker, 1993.