- java.lang.Object
-
- com.openinventor.inventor.Inventor
-
- com.openinventor.inventor.misc.SoBase
-
- com.openinventor.inventor.fields.SoFieldContainer
-
- com.openinventor.inventor.engines.SoEngine
-
- com.openinventor.imageviz.engines.SoImageVizEngine
-
- com.openinventor.imageviz.engines.imagesegmentation.regiongrowing.SoMarkerBasedWatershedProcessing
-
- All Implemented Interfaces:
- SafeDisposable
public class SoMarkerBasedWatershedProcessing extends SoImageVizEngine
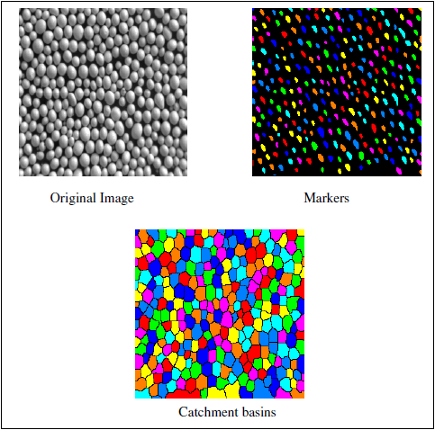
SoMarkerBasedWatershedProcessingengine performs a fast determination of the watershed lines. For an introduction, see Watershed principle.SoMarkerBasedWatershedProcessinghas 2 configurations. SeeoutputModefield.This engine performs a fast determination of the watershed lines from specified markers in a label image, followed by a labelling of the complementary set. It can be viewed as the zones of influence of the markers.
Either the separated basins are output in a label image, the crest lines being part of the complementary (not a label), or the crest lines are output in a binary image.
Note: Because two bits are used to code the pixels during the algorithm, input gray levels image should range from 0 to 16383. If the range is greater, a normalization is applied to reduce the dynamic of this image.
Notice: This engine requires to preliminarily load the whole input data set into memory to be computed. As a consequence the input data set will be automatically loaded before the execution of this engine, ignoring the maximum memory parameter of the SbImageDataAdapterHelper.getAppropriateAdapterfunction orSoFileDataAdapterclassIf the input data set cannot fit in memory, this engine will fail during its computation.
See also:
SoAddObjectToLabelProcessing,SoGrayscaleResconstructionProcessingFile format/default:
MarkerBasedWatershedProcessing {
computeMode MODE_AUTO neighborhood3d CONNECTIVITY_26 outputMode WATERSHED_RIDGES inGrayImage NULL inMarkerImage NULL precisionMode REPEATABLE
Library references: catchbasin fastwatershed
-
-
Nested Class Summary
Nested Classes Modifier and Type Class and Description static classSoMarkerBasedWatershedProcessing.OutputModesstatic classSoMarkerBasedWatershedProcessing.PrecisionModes-
Nested classes/interfaces inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
SoImageVizEngine.ComputeModes, SoImageVizEngine.EventArg, SoImageVizEngine.Neighborhood3ds
-
Nested classes/interfaces inherited from class com.openinventor.inventor.Inventor
Inventor.ConstructorCommand
-
-
Field Summary
Fields Modifier and Type Field and Description SoSFEnum<SoImageVizEngine.ComputeModes>computeModeSelect the compute Mode (2D or 3D or AUTO) .static intFASTDeprecated.UseSoMarkerBasedWatershedProcessing.PrecisionModes.FASTinstead.SoSFImageDataAdapterinGrayImageThe input grayscale image.SoSFImageDataAdapterinMarkerImageThe input marker (label) image.SoSFEnum<SoImageVizEngine.Neighborhood3ds>neighborhood3dIn 3D configuration (seecomputeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels.SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter>outObjectImageThe output image.SoSFEnum<SoMarkerBasedWatershedProcessing.OutputModes>outputModeSelect the type of output mode.SoSFEnum<SoMarkerBasedWatershedProcessing.PrecisionModes>precisionModeSelect the mode of algorithm precision for watershed.static intREPEATABLEDeprecated.static intSEPARATED_BASINSDeprecated.static intWATERSHED_RIDGESDeprecated.-
Fields inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
CONNECTIVITY_18, CONNECTIVITY_26, CONNECTIVITY_6, MODE_2D, MODE_3D, MODE_AUTO, onBegin, onEnd, onProgress
-
Fields inherited from class com.openinventor.inventor.Inventor
VERBOSE_LEVEL, ZeroHandle
-
-
Constructor Summary
Constructors Constructor and Description SoMarkerBasedWatershedProcessing()Constructor.
-
Method Summary
-
Methods inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
abortEvaluate, isEvaluating, startEvaluate, waitEvaluate
-
Methods inherited from class com.openinventor.inventor.engines.SoEngine
copy, getByName, getOutput, getOutputName
-
Methods inherited from class com.openinventor.inventor.fields.SoFieldContainer
copyFieldValues, copyFieldValues, enableNotify, fieldsAreEqual, get, getAllFields, getEventIn, getEventOut, getField, getFieldName, hasDefaultValues, isNotifyEnabled, set, setToDefaults
-
Methods inherited from class com.openinventor.inventor.misc.SoBase
dispose, getEXTERNPROTO, getName, getPROTO, isDisposable, isSynchronizable, setName, setSynchronizable, touch
-
Methods inherited from class com.openinventor.inventor.Inventor
getAddress, getNativeResourceHandle, startInternalThreads, stopInternalThreads
-
-
-
-
Field Detail
-
SEPARATED_BASINS
@Deprecated public static final int SEPARATED_BASINS
Deprecated. UseSoMarkerBasedWatershedProcessing.OutputModes.SEPARATED_BASINSinstead.
-
WATERSHED_RIDGES
@Deprecated public static final int WATERSHED_RIDGES
Deprecated. UseSoMarkerBasedWatershedProcessing.OutputModes.WATERSHED_RIDGESinstead.
-
REPEATABLE
@Deprecated public static final int REPEATABLE
Deprecated. UseSoMarkerBasedWatershedProcessing.PrecisionModes.REPEATABLEinstead.
-
FAST
@Deprecated public static final int FAST
Deprecated. UseSoMarkerBasedWatershedProcessing.PrecisionModes.FASTinstead.
-
computeMode
public final SoSFEnum<SoImageVizEngine.ComputeModes> computeMode
Select the compute Mode (2D or 3D or AUTO) . Default is MODE_AUTO
-
neighborhood3d
public final SoSFEnum<SoImageVizEngine.Neighborhood3ds> neighborhood3d
In 3D configuration (seecomputeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels. . Default is CONNECTIVITY_26.
-
outputMode
public final SoSFEnum<SoMarkerBasedWatershedProcessing.OutputModes> outputMode
Select the type of output mode. . Default is WATERSHED_RIDGES
-
inGrayImage
public final SoSFImageDataAdapter inGrayImage
The input grayscale image. Default value is NULL. Supported types include: grayscale image.
-
inMarkerImage
public final SoSFImageDataAdapter inMarkerImage
The input marker (label) image. Default value is NULL. Supported types include: label color image.
-
precisionMode
public final SoSFEnum<SoMarkerBasedWatershedProcessing.PrecisionModes> precisionMode
Select the mode of algorithm precision for watershed. . Default is REPEATABLE
-
outObjectImage
public final SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter> outObjectImage
The output image. Default value is NULL. Supported types include: binary image.
-
-