SoTopHatProcessing Class Reference
[Binarization]
 SoTopHatProcessing image filter
More...
SoTopHatProcessing image filter
More...
#include <ImageViz/Engines/ImageSegmentation/Binarization/SoTopHatProcessing.h>
Public Types | |
| enum | ElementShape { ROUGH = 0, SMOOTH = 1 } |
| enum | ObjectLightness { BRIGHT_OBJECTS = 0, DARK_OBJECTS = 1 } |
Public Member Functions | |
| SoTopHatProcessing () | |
Public Attributes | |
| SoSFEnum | computeMode |
| SoSFEnum | elementShape |
| SoSFImageDataAdapter | inGrayImage |
| SoSFInt32 | elementSize |
| SoSFEnum | objectLightness |
| SoSFVec2f | thresholdLevel |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outBinaryImage |
Detailed Description
SoTopHatProcessing image filter
The SoTopHatProcessing engine performs a Top-Hat algorithm on a gray level image.
The Top-Hat segmentation extracts small elements and details from given images. It detects the dark or the bright area, corresponding to the valleys or the narrow peaks. There exist two types of Top-Hat transform:
- The Black Top-Hat: it is defined as the difference between the closing with a particular kernel and the input image. The smaller is the kernel, the smaller are the elements in the Top-Hat image. A threshold allows selecting the darker elements of the Top-Hat result, i.e., the depth of the selected valleys. See Figure 1.
- The White Top-Hat: it is defined as the difference between the input image and its opening (using a particular kernel). The threshold allows selecting the brighter elements of the Top-Hat result.
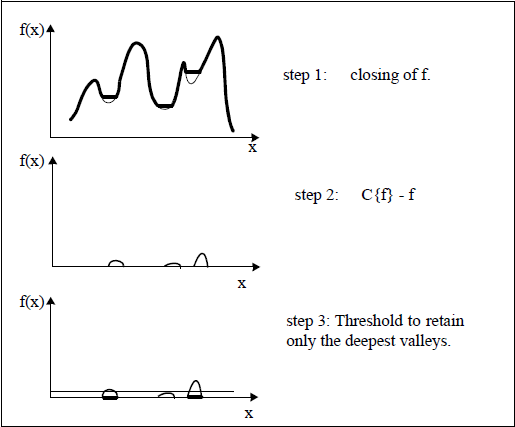
Figure 1: Black Top-Hat computation
The Top-Hat module is divided into two phases:
- The Top-Hat image computation, depending on the Top-Hat type and the closing/opening parameters; (step 1 and 2 on figure 1)
- The Thresholding, to select the valleys/narrow peaks depth. (step 3 on figure 1)
The SoTopHatProcessing engine also includes a rough and a smooth mode. Whereas the rough mode uses a standard structuring element, the smooth mode employs a more sophisticated volumic structuring element, a rhombodecahedron, which usually generates a much more precise Top-Hat.
FILE FORMAT/DEFAULT
- TopHatProcessing {
| computeMode | MODE_AUTO |
| elementShape | ROUGH |
| inGrayImage | NULL |
| elementSize | 3 |
| objectLightness | BRIGHT_OBJECTS |
| thresholdLevel | 128.0f 255.0f |
Library references: high_tophat tophat
Member Enumeration Documentation
- Enumerator:
BRIGHT_OBJECTS The engine applies a white Top-Hat and detects small bright area.
DARK_OBJECTS The engine applies a black Top-Hat and detects small dark area.
SEE ALSO
SoOpeningCubeProcessing, SoClosingCubeProcessing, SoThresholdingProcessing.
Constructor & Destructor Documentation
| SoTopHatProcessing::SoTopHatProcessing | ( | ) |
Constructor.
Member Data Documentation
Select the compute Mode (2D or 3D or AUTO) Use enum ComputeMode.
Default is MODE_AUTO
Select the type of structuring element shape.
Use enum ElementShape. Default is ROUGH
The half size of the structuring element.
A structuring element always has an odd side length (3x3, 5x5, etc) which is defined by 2 * elementSize + 1. Default value is 3.
Input grey level image.
Default value is NULL. Supported types include: grayscale binary label image.
Select the lightness mode for object to detect.
Use enum ObjectLightness. Default is BRIGHT_OBJECTS
The output binary image.
Default value is NULL. Supported types include: binary image.
The low and high threshold levels.
Default value is SbVec2f(128.0f,255.0f).
The documentation for this class was generated from the following file:
- ImageViz/Engines/ImageSegmentation/Binarization/SoTopHatProcessing.h