SoRotateProcessing2d Class Reference
[GeometricTransforms]
 SoRotateProcessing2d image filter
More...
SoRotateProcessing2d image filter
More...
#include <ImageViz/Engines/GeometryAndMatching/GeometricTransforms/SoRotateProcessing2d.h>
Public Types | |
| enum | PrecisionMode { NEARBY_PIXEL = 0, INTERPOLATION = 1 } |
Public Member Functions | |
| SoRotateProcessing2d () | |
Public Attributes | |
| SoSFImageDataAdapter | inImage |
| SoSFVec2i32 | rotationCenter |
| SoSFFloat | rotationAngle |
| SoSFEnum | precisionMode |
| SoImageVizEngineOutput < SoSFImageDataAdapter, SoImageDataAdapter * > | outImage |
Detailed Description
SoRotateProcessing2d image filter
The SoRotateProcessing2d filter performs a rotation of an image by a user-defined angle  and an origin
and an origin  . The new coordinates
. The new coordinates  can be expressed as a function of the old coordinates
can be expressed as a function of the old coordinates  :
:
![\[\left\{\begin{matrix}x'&=&(x-x_0)\cdot\cos\theta - (y-y_0)\cdot\sin\theta + x_0\\ y'&=&(x-x_0)\cdot\sin\theta + (y-y_0)\cdot\cos\theta + y_0\end{matrix}\right\}\]](form_139.png)
where  are the coordinates of the center of the rotation. Or in a matrix notation:
are the coordinates of the center of the rotation. Or in a matrix notation:
![\[\begin{bmatrix}x'\\y'\end{bmatrix} = \begin{bmatrix}\cos\theta&-\sin\theta\\\sin\theta&\cos\theta\end{bmatrix} \cdot\begin{bmatrix}x-x_0\\y-y_0\end{bmatrix} + \begin{bmatrix}x_0\\y_0\end{bmatrix}\]](form_141.png)
Once again, destination pixels may be outside the image, and normally these pixels are ignored. Furthermore, the coordinates obtained are not always integers, even though an image is a discrete space. The figure below illustrates the grid of the resultant image, the point  being a pixel in this image. The points are generated from the rotation of the original image and do not fit on the grid.
being a pixel in this image. The points are generated from the rotation of the original image and do not fit on the grid.
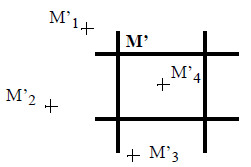
Figure 1: Rotation
To calculate the intensity of each pixel , two methods are possible:
- Take the grey level of the nearest neighbor. For the above example would be given the intensity of

- Take into account the four nearest neighbors and calculate the grey level based on the average of the four points, weighted by their distance, as in:
![\[g'=\frac{f_1\times g'_1+f_2\times g'_2+f_3\times g'_3+f_4\times g'_4}{f_1+f_2+f_3+f_4}\]](form_144.png)
If  denotes the distance
denotes the distance  ,
,  is defined as:
is defined as:
![\[f_i=\prod_{\substack{j=1\\j\neq i}}^{j=4}d_j\]](form_148.png)
e.g.  .
.
The choice of the 's ensures that the interpolated value is equal to  if matches
if matches  . This method gives better results but requires more computation time.
. This method gives better results but requires more computation time.
NOTE: In SoRotateProcessing2d filter, the image is perceived as a cylinder, where the information outside the image area wraps around and is placed in the blank part.
FILE FORMAT/DEFAULT
- RotateProcessing2d {
| inImage | NULL |
| rotationCenter | 0 0 |
| rotationAngle | 10.0f |
| precisionMode | NEARBY_PIXEL |
Library references: rotate
Member Enumeration Documentation
Constructor & Destructor Documentation
| SoRotateProcessing2d::SoRotateProcessing2d | ( | ) |
Constructor.
Member Data Documentation
The input image.
Default value is NULL. Supported types include: grayscale binary label color image.
The output image.
Default value is NULL. Supported types include: grayscale binary label color image.
Select the interpolation mode.
Use enum PrecisionMode. Default is NEARBY_PIXEL
The angle of the rotation in degrees (not radians).
Default value is 10.0f.
The rotation center coordinates.
Default value is SbVec2i32(0,0).
The documentation for this class was generated from the following file:
- ImageViz/Engines/GeometryAndMatching/GeometricTransforms/SoRotateProcessing2d.h