- java.lang.Object
-
- com.openinventor.inventor.Inventor
-
- com.openinventor.inventor.misc.SoBase
-
- com.openinventor.inventor.fields.SoFieldContainer
-
- com.openinventor.inventor.engines.SoEngine
-
- com.openinventor.imageviz.engines.SoImageVizEngine
-
- com.openinventor.imageviz.engines.mathematicalmorphology.geodesictransformations.SoUltimateErosionProcessing
-
- All Implemented Interfaces:
- SafeDisposable
public class SoUltimateErosionProcessing extends SoImageVizEngine
SoUltimateErosionProcessingengine TheSoUltimateErosionProcessingengine computes theSoUltimateErosionProcessingeroded set.For an introduction, see section Morphology.
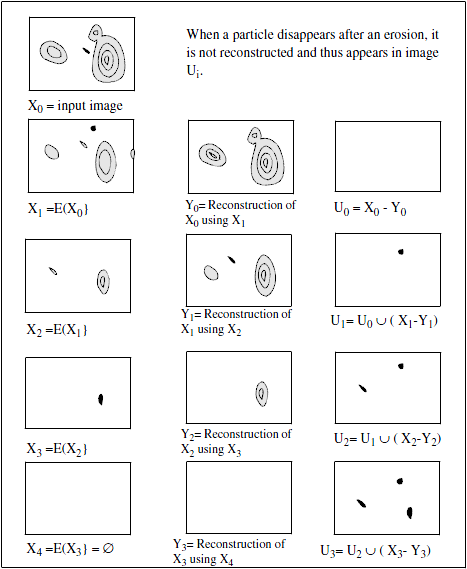
This engine computes the
SoUltimateErosionProcessingeroded set of the input image. Ultimate erosion consists of successive erosion of the image until all objects disappear ( images below). Then each erosion step is reconstructed into the previous erosion step (
images below). Then each erosion step is reconstructed into the previous erosion step (  image below). The difference between the eroded image and the reconstructed image is the centroid of objects which disappeared at the erosion step number
image below). The difference between the eroded image and the reconstructed image is the centroid of objects which disappeared at the erosion step number  .
.
This engine enables counting the number of convex particles, even if some of them are touching each other, as long as the pseudo-centre of each particle is outside of other particles.
 See also:
See also:
SoBorderKillProcessing,SoReconstructionFromMarkersProcessing.File format/default:
UltimateErosionProcessing {
computeMode MODE_AUTO neighborhood3d CONNECTIVITY_26 inBinaryImage NULL
Library references: ultimate
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
SoImageVizEngine.ComputeModes, SoImageVizEngine.EventArg, SoImageVizEngine.Neighborhood3ds
-
Nested classes/interfaces inherited from class com.openinventor.inventor.Inventor
Inventor.ConstructorCommand
-
-
Field Summary
Fields Modifier and Type Field and Description SoSFEnum<SoImageVizEngine.ComputeModes>computeModeSelect the compute Mode (2D or 3D or AUTO) .SoSFImageDataAdapterinBinaryImageThe input binary image.SoSFEnum<SoImageVizEngine.Neighborhood3ds>neighborhood3dIn 3D configuration (seecomputeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels.SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter>outBinaryImageThe output binary image.-
Fields inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
CONNECTIVITY_18, CONNECTIVITY_26, CONNECTIVITY_6, MODE_2D, MODE_3D, MODE_AUTO, onBegin, onEnd, onProgress
-
Fields inherited from class com.openinventor.inventor.Inventor
VERBOSE_LEVEL, ZeroHandle
-
-
Constructor Summary
Constructors Constructor and Description SoUltimateErosionProcessing()Constructor.
-
Method Summary
-
Methods inherited from class com.openinventor.imageviz.engines.SoImageVizEngine
abortEvaluate, isEvaluating, startEvaluate, waitEvaluate
-
Methods inherited from class com.openinventor.inventor.engines.SoEngine
copy, getByName, getOutput, getOutputName
-
Methods inherited from class com.openinventor.inventor.fields.SoFieldContainer
copyFieldValues, copyFieldValues, enableNotify, fieldsAreEqual, get, getAllFields, getEventIn, getEventOut, getField, getFieldName, hasDefaultValues, isNotifyEnabled, set, setToDefaults
-
Methods inherited from class com.openinventor.inventor.misc.SoBase
dispose, getEXTERNPROTO, getName, getPROTO, isDisposable, isSynchronizable, setName, setSynchronizable, touch
-
Methods inherited from class com.openinventor.inventor.Inventor
getAddress, getNativeResourceHandle, startInternalThreads, stopInternalThreads
-
-
-
-
Field Detail
-
computeMode
public final SoSFEnum<SoImageVizEngine.ComputeModes> computeMode
Select the compute Mode (2D or 3D or AUTO) . Default is MODE_AUTO
-
neighborhood3d
public final SoSFEnum<SoImageVizEngine.Neighborhood3ds> neighborhood3d
In 3D configuration (seecomputeMode), the neighborhood connectivity defines the connectivity considered for processing adjacent voxels. . Default is CONNECTIVITY_26.
-
inBinaryImage
public final SoSFImageDataAdapter inBinaryImage
The input binary image. Default value is NULL. Supported types include: binary color image.
-
outBinaryImage
public final SoImageVizEngineOutput<SoSFImageDataAdapter,SoImageDataAdapter> outBinaryImage
The output binary image. Default value is NULL. Supported types include: binary image.
-
-