-
Class Summary Class Description SoChamferDistanceMapProcessing2d SoChamferDistanceMapProcessing2dengine TheSoChamferDistanceMapProcessing2dengine computes the chamfer distance transformation.SoChamferDistanceMapProcessing3d SoChamferDistanceMapProcessing3dengine TheSoChamferDistanceMapProcessing3dengine computes a 3D chamfer distance transformation.SoChessboardDistanceMapProcessing SoChessboardDistanceMapProcessingengine TheSoChessboardDistanceMapProcessingengine computes the chessboard distance transformation.SoClosestBoundaryPointsProcessing2d SoClosestBoundaryPointsProcessing2dengine TheSoClosestBoundaryPointsProcessing2dengine computes the chamfer distance map on object boundary and the closest point.SoClosestBoundaryPointsProcessing3d SoClosestBoundaryPointsProcessing3dengine TheSoClosestBoundaryPointsProcessing3dengine computes the chamfer distance map on object boundary and the closest point.SoEuclideanDistanceMapProcessing3d SoEuclideanDistanceMapProcessing3dimage filter This algorithm computes a 3D distance map for a 3D object.SoGeodesicDistanceMapProcessing SoGeodesicDistanceMapProcessingengine TheSoGeodesicDistanceMapProcessingengine computes the Chamfer distance using a mask of forbidden areas.SoGeodesicPropagationProcessing2d SoGeodesicPropagationProcessing2dengine For an introduction to geodesy, see section Geodesy Principle.SoLocalThicknessMapProcessing3d SoLocalThicknessMapProcessing3dengine This algorithm computes an inside 3D euclidean map of a 3D object.SoTimeMapProcessing SoTimeMapProcessingengine TheSoTimeMapProcessingengine computes the shortest travel time between one point of the output image and the binary mask. -
Enum Summary Enum Description SoEuclideanDistanceMapProcessing3d.BorderConditions This enumeration defines the border condition.SoEuclideanDistanceMapProcessing3d.MappingModes This enumeration defines all regions in which the distance map is computed.SoLocalThicknessMapProcessing3d.PrecisionModes
Package com.openinventor.imageviz.engines.mathematicalmorphology.distancemaps Description
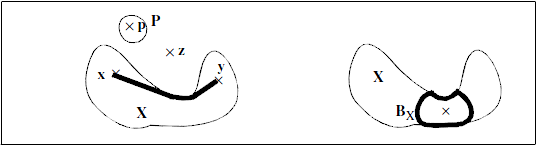
Geodesy is by definition the science of measuring the shape of the earth. When applied to image processing it is the science of measuring the exact shape of objects included in an image. The geodesic distance is defined as follows:
If two points  and
and  belong to
belong to  then
then  is the shortest distance between the two points with the condition that the entire path between the points is included in the particle . If one of the points is outside then
is the shortest distance between the two points with the condition that the entire path between the points is included in the particle . If one of the points is outside then  . If the points belong to 2 disjointed components, then
. If the points belong to 2 disjointed components, then 
This geodesic distance is actually a distance for any set without any hole. A geodesic disk,  , is then defined, as shown in figure below.
, is then defined, as shown in figure below.
 The geodesic notion implies that each particle is fully independent of its neighbours in the image. Moreover, one may introduce the geodesic erosion and dilation. The geodesic dilation is equivalent to a reconstruction in the continuous space. One can show that a discrete geodesic dilation of size
The geodesic notion implies that each particle is fully independent of its neighbours in the image. Moreover, one may introduce the geodesic erosion and dilation. The geodesic dilation is equivalent to a reconstruction in the continuous space. One can show that a discrete geodesic dilation of size  is actually dilations of size 1, each dilation being followed by an intersection with the set . In this case, the underlying discrete distance is defined by the elementary discrete disk (a square or hexagon depending on the grid). The propagation function is then defined as:
is actually dilations of size 1, each dilation being followed by an intersection with the set . In this case, the underlying discrete distance is defined by the elementary discrete disk (a square or hexagon depending on the grid). The propagation function is then defined as:

It corresponds to the geodesic distance between point and the furthest point of .